电话
191 2833 8135
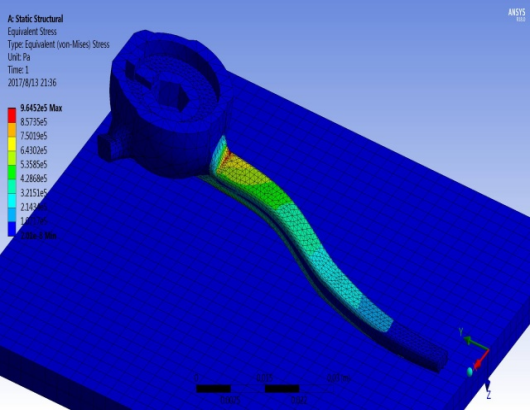
有限元分析(FEA)是扫地机器人研发中的一项关键技术,它通过计算机模拟来预测和改进产品在实际使用中的各项物理性能,是产品迈向高品质、高可靠性的基石。扫地机器人 FEA 是通过离散化建模与数值计算,模拟其在真实工况下的力学响应,验证关键结构强度、刚度、接触可靠性及振动疲劳,支撑设计优化与成本控制。
| 分析项目 | 核心目的 | 关键应用场景 |
|---|---|---|
| 静态结构分析 | 评估结构的刚度、强度和承载能力,确保在静态或准静态载荷下不会发生塑性变形或断裂。 | - 零部件强度:分析边刷、传动箱、滚刷支架等受力部件的应力分布。 - 刚度校核:检查关键部件的位移(变形)是否在允许范围内,避免卡滞。 |
| 动力学分析 | 研究结构在动态载荷下的响应,如振动和冲击,解决共振、噪声和抗冲击问题。 | - 模态分析:计算机器人的固有频率和振型,避免发生共振,降低噪音并保护元器件。 - 跌落/冲击模拟:模拟机器人在意外跌落或碰撞时的受力情况,评估结构强度。 - 振动响应分析:分析齿轮啮合等周期性激励引起的结构振动和噪声。 |
| 接触分析 | 模拟两个或多个部件相互接触、分离、摩擦或碰撞的复杂过程。 | - 边刷与地面接触:分析边刷工作时的接触力、位移响应。 - 越障/爬坡分析:模拟机器人越障时驱动轮与障碍物的接触状态,评估抓地力和动力需求。 - 跌落碰撞:模拟机器人与地面发生复杂、高度非线性的接触碰撞过程。 |
| 热分析 | 预测和优化产品内部的温度分布,防止过热。 | - 主板散热:分析主板等高发热器件的温度场,避免热量积聚导致性能下降或元器件老化。 - 电池热管理:分析充放电过程中电池包的温度分布,确保其在安全范围内工作。 |
| 多体动力学(MBD)分析 | 分析和优化由多个运动部件组成的机械系统的动态性能。 | - 传动系统优化:模拟齿轮箱内各部件间的运动关系和受力,优化齿轮参数。 - 机构运动学:仿真卸料机构、清扫机构等的运动,验证机构设计的合理性。 |
汇聚各行业标杆信赖解决方案案例,实现更安全的测试与更精准的结果。
依托我们久经验证的软硬件平台及工具包,实现更安全的测试与更精准的结果。